
Россия: Все новые электровозы серии «Ермак» (платформа ЭС5К), которые производятся на Новочеркасском электровозостроительном заводе (НЭВЗ, входит в «Трансмашхолдинг», ТМХ), с 2021 года оснащаются интеллектуальной системой ИСАВП-РТ-М, позволяющей осуществлять вождение грузовых поездов по технологии «Виртуальная сцепка». Она активно внедряется на сети российских железных дорог, благодаря чему удается существенно повысить пропускную способность стальных магистралей.
Востребованность технологии
Одной из ключевых задач РЖД является увеличение пропускной и провозной способности действующей магистральной сети. От этого во многом зависит наращивание темпов развития промышленности и экономики страны в целом. Существующих инфраструктурных мощностей не хватает для обеспечения перевозок ежегодно растущих объемов грузов.
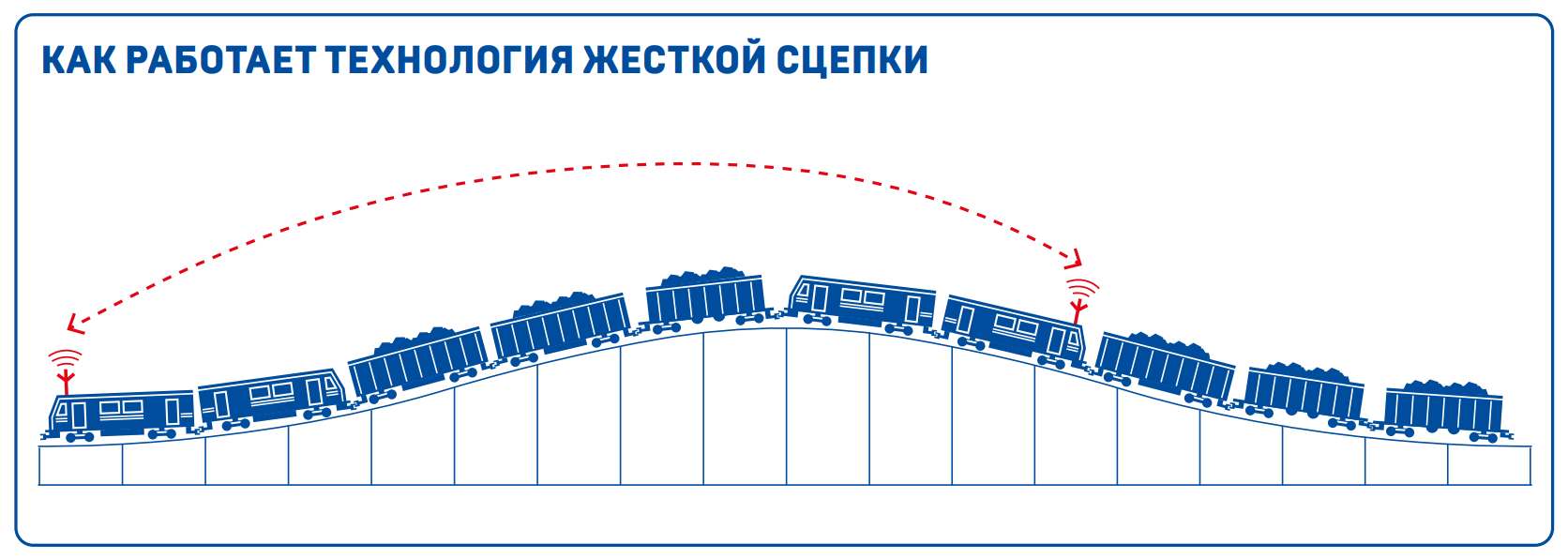
Задача повышения провозной способности имеет несколько решений. На БАМе и Транссибе строятся новые железнодорожные пути. Параллельно внедряются автоматизированные системы в локомотивном комплексе. Одна из таких технологий с середины 2000-х годов обеспечила значительное увеличение объемов перевозимых грузов за счет автоматизации вождения соединенных грузовых поездов с объединенной тормозной магистралью. Суть в том, что два состава с нормативным весом 6300 т объединяются в один поезд общим весом 12600 т под управлением интеллектуальной системы автоматизированного вождения поездов ИСАВП-РТ, разработанной компанией «АВП Технология» (входит в ГК «ТМХ Интеллектуальные системы»). Система обеспечивает управление движением грузового состава с ведущего локомотива, находящегося в голове соединенного поезда, ведомым локомотивом, расположенным в середине. Технология получила название «Жесткая сцепка». Команды управления режимами тяги и торможения с ведущего на ведомый локомотив передаются непрерывно по радиоканалу.
Идея жесткой сцепки отлично себя зарекомендовала, особенно в периоды проведения «оконных» работ, когда движение осуществляется в обоих направлениях по одному пути. При этом у жесткой сцепки есть определенные ограничения, связанные с длительным временем подготовки соединенного поезда к отправлению.
 Источник: Вектор ТМХ
Источник: Вектор ТМХ
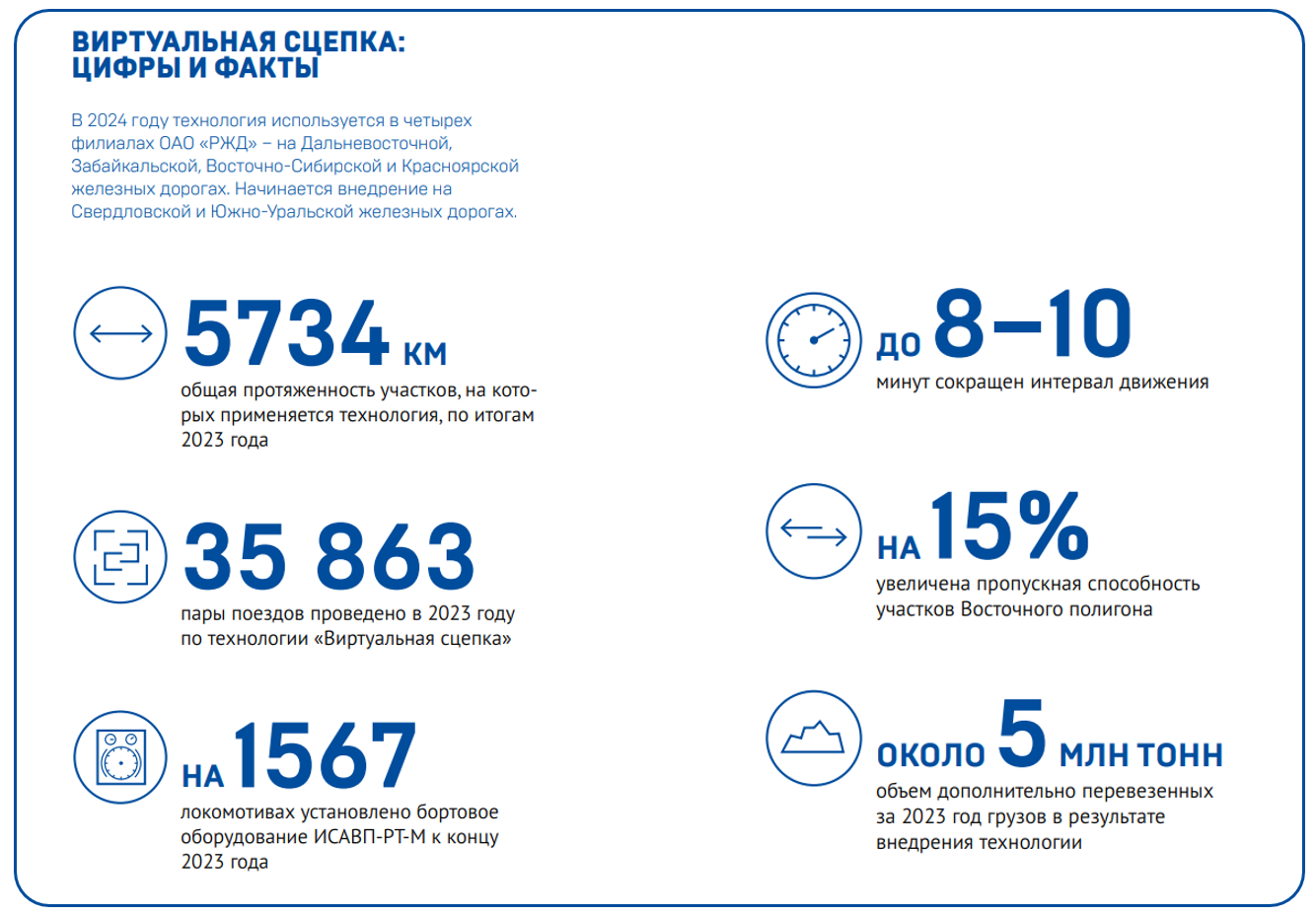
В 2017 году «АВП Технология» приступила к разработке технологии, позволяющей значительно повысить эффективность жесткой сцепки. Для этого, в частности, требовалось оборудование, способное обеспечить устойчивую связь по радиоканалу между локомотивами на расстоянии не менее шести километров. В 2017–2018 годах был проведен необходимый объем научно-исследовательских и опытно-конструкторских работ, разработаны необходимые средства передачи данных. С января 2019 года на участке Хабаровск II — Ружино Дальневосточной железной дороги начались испытания новой технологии, получившей название «Виртуальная сцепка», которая сняла все имеющиеся ограничения жесткой сцепки. Испытания были признаны успешными, и уже в 2020 году системами ИСАВП-РТ-М были оснащены более 400 магистральных локомотивов 3ЭС5К.
Примененные решения
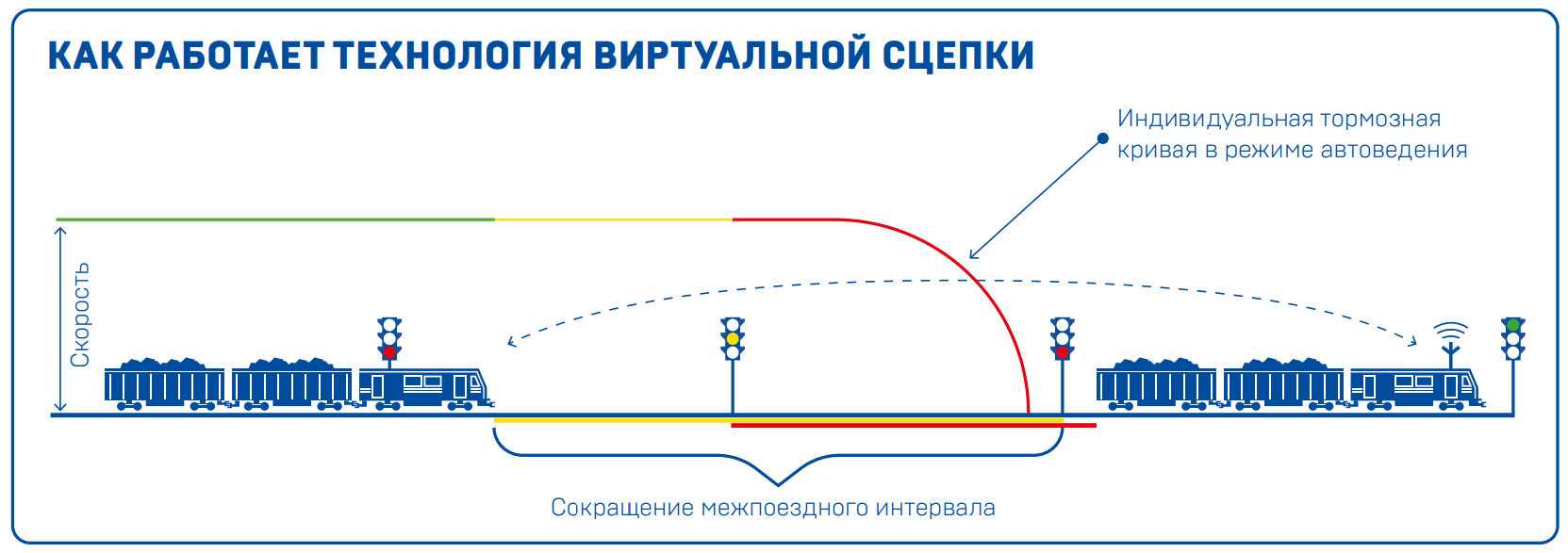
«Виртуальная сцепка» — это технология, которая обеспечивает движение двух и более грузовых поездов в попутном следовании на минимально допустимом расстоянии друг от друга. В настоящее время грузовые поезда на участке следования осуществляют движение на желтый сигнал светофора с максимально возможной скоростью. Такой эффект достигает ся за счет непрерывного получения данных о параметрах движения с локомотива, следующего впереди (виртуальный ведущий), на локомотив, следующий сзади (виртуальный ведомый).
Интеллектуальная система управления ИСАВП-РТ-М виртуального ведомого локомотива контролирует местоположение, скорость, режимы управления, показания поездных светофоров, поступающие с виртуального ведущего поезда. Допустимая скорость и дистанция между поездами определяется виртуальным ведомым самостоятельно в каждом конкретном случае исходя из множества характеристик: скорости и местоположения виртуального ведущего, массы поездов, плана и профиля пути и целого ряда других факторов. При этом главная задача технологии — обеспечить максимальный уровень безопасности в любых ситуациях, в том числе предусматривающих необходимость своевременного снижения скорости и остановки перед запрещающим сигналом светофора.
Для определения оптимальных режимов управления непрерывно производится расчет эффективности работы системы торможения виртуально связанных поездов. Благодаря применению технологии автоведения система способна вести грузовые составы полностью в автоматическом режиме без непосредственного участия в управлении движением машиниста, который, в свою очередь, только контролирует работу автоматики.
Виртуальная сцепка предусматривает, что каждый локомотив самостоятельно принимает решение, как он будет осуществлять движение по конкретному участку. В зависимости от того, останавливается впереди идущий поезд или продолжает движение, занят ли следующий участок пути другим поездом перед виртуальным ведущим, виртуальный ведомый продумывает стратегию движения поезда на многие километры вперед. Еще одной особенностью виртуальной сцепки является то, что поезда следуют с минимально возможным расходом электроэнергии на тягу. Система автоведения просчитывает маршрут и применяет наиболее рациональные режимы управления: когда включить или выключить тягу, в какой момент применить рекуперативное торможение.
 Источник: Вектор ТМХ
Источник: Вектор ТМХ
В ходе создания технологии виртуальной сцепки разработчики решили ряд ключевых задач: обеспечение надежной и устойчивой связи между поездами в попутном следовании; сбор и передача телеметрических данных о движении поездов, работе основных узлов и агрегатов локомотива в информационные системы РЖД; прогнозирование переключения сигналов светофоров в зависимости от местоположения поездов на участке следования и реализуемых локомотивами режимов управления движением. Все примененные в составе технологии технические решения и программное обеспечение разработаны российскими инженерами.
Как отмечал начальник департамента технической политики РЖД Владимир Андреев, технология виртуальной сцепки при ее внедрении на Восточном полигоне подтвердила свою эффективность и обеспечила уплотнение графика движения поездов за счет сокращения межпоездного интервала и повышения участковой скорости, в том числе по сравнению с жестко соединенными поездами.
Текущие результаты
В 2023 году по технологии виртуальной сцепки были проведены 35863 пары поездов: это в три раза больше по сравнению с годом ранее. На сегодня системами ИСАВП-РТ-М уже оснащены более 1500 локомотивов серии 3ЭС5К, которые эксплуатируются на Восточном полигоне. И их количество постоянно увеличивается. Технология универсальна, необходимое оборудование можно установить на современный тяговый подвижной состав любого типа. С 2021 года НЭВЗ освоил серийное производство электровозов «Ермак», включающих в себя систему ИСАВП-РТ-М. В условиях депо происходит оснащение тягового подвижного состава постоянного и переменного тока, который уже находится в эксплуатации. Планируется оснащение системой ИСАВП-РТ-М магистральных грузовых тепловозов, которые работают на Байкало-Амурской магистрали.
 (увеличить). Источник: Вектор ТМХ
(увеличить). Источник: Вектор ТМХ
Опыт применения виртуальной сцепки показал несколько преимуществ. В частности, увеличение пропускной способности участков железных дорог, на которых удается пропускать до 15 дополнительных пар поездов в сутки, повышение безопасности движения, в том числе за счет автоматизации движения поездов по неправильным путям, облегчение труда локомотивных бригад. При текущем развитии железнодорожной инфраструктуры, по расчетам специалистов, использование новой технологии позволяет повысить пропускную способность минимум на 15%.
Дальнейшие перспективы
Технология имеет огромный потенциал для дальнейшего развития. Обеспечивается регулярное движение виртуально сцепленных пар поездов. Совместно с РЖД ведется работа над увеличением количества поездов, одновременно следующих по технологии.
Так, в сентябре 2023 года на Дальневосточной железной дороге по технологии виртуальной сцепки впервые были проведены сразу 5 поездов. Порожние составы общей массой 9892 т проследовали более 1100 км от Смоляниново в Приморском крае до Облучья в Еврейской автономной области с минимальными интервалами в 9 мин. В ноябре 2023 года на участке Хабаровск — Ружино по технологии впервые был проведен «пакет» из пяти груженых поездов общей массой 26663 т.
Об успехах проекта в январе 2024 года Президенту России Владимиру Путину рассказал генеральный директор РЖД Олег Белозеров: «Когда мы ведем пять поездов по технологии виртуальной сцепки, это пять поездов, которые друг друга видят и ориентируются друг на друга: два поезда — контейнерных, три поезда — с порожним составом. Но длина, если все составы сложить, — более пяти километров, 5250 метров. Между ними небольшие расстояния, пока порядка четырех километров, это дает нам возможность активнее использовать построенную инфраструктуру. Посчитали: почти 21 километр — такая связка у нас есть, дает очень серьезный прирост».
Увеличение количества поездов в одном «пакете» — одно из приоритетных направлений развития технологии виртуальной сцепки. Параллельно ведется работа по организации обмена данными между локомотивами и системами управления на станциях для автоматизации с целью значительного сокращения времени выполнения технологических операций по приему/отправлению/проследованию грузовых поездов по станциям.
Актуально этой задачи обусловлена тем, что современный локомотив не обеспечен цифровым каналом обмена ключевой информацией со станцией. Необходимо построить соответствующую сеть передачи данных, которая позволит системам управления движением РЖД отправлять информацию о работе станции в систему ИСАВП-РТ-М локомотива. Получив необходимую информацию от станции, ИСАВП-РТ-М сможет автоматически обеспечить выполнение соответствующих технологических операций, при этом значительно сократив затрачиваемое на это время.
«АВП Технология» проводила соответствующие эксперименты в 2021 году на станции Ружино. Применение режима автоведения в системе ИСАВП-РТ-М при наличии соответствующей информации от станции о маршруте приема позволило на 40% сократить время выполнения технологической операции приема поезда по сравнению с ручным режимом ведения.
Продолжаются работы по дальнейшему сокращению интервалов попутного следования между поездами, осуществляющими движение по технологии виртуальной сцепки, а также по снятию ограничений на количество одновременно следующих поездов. Кроме того, специалисты заняты реализацией решений, которые дадут возможность обеспечить движение по технологии виртуальной сцепки в попутном следовании любого поезда — пассажирского, грузового, пригородного.
Автор: Дмитрий Тихонов, советник генерального директора «АВП Технология» (входит в ГК «ТМХ Интеллектуальные системы»)
Подготовлено на основе статьи «Виртуальное — реально» из журнала «Вектор ТМХ» № 1 (56) 2024
Следите оперативно за новостями рынков подвижного состава в Telegram-канале ROLLINGSTOCK