
Германия: В рамках реализуемого национальным перевозчиком проекта цифровизации железных дорог страны Digitalen Schiene Deutschland (DSD) в июне 2023 года завершилось тестирование системы обнаружения препятствий на четырех поездах городской сети Гамбурга, автоматизированных до уровня GoA2. Затем стартовал следующий проект DSD — AutomatedTrain. Он рассчитан на 3 года и направлен на испытание на городской железной дороге Штутгарта технологии беспилотного вождения поездов на открытой инфраструктуре. В своей статье в немецком отраслевом журнале «Deine Bahn» сотрудники инфраструктурного подразделения перевозчика DB InfraGO и представитель компании-разработчика dSPACE рассказали про один из важнейших аспектов внедрения беспилота на рельсовом транспорте — имитационное моделирование в цифровой среде. Редакция ROLLINGSTOCK перевела и адаптировала данный материал.
Как пишут авторы, из-за ограниченности и высоких стандартов безопасности испытания подвижного состава с наивысшим уровнем автоматизации GoA4 в реальных условиях являются технически сложным, длительным и дорогостоящим процессом. По этим причинам цель текущих работ по беспилотному движению состоит в том, чтобы выполнять как можно больше таких процессов в смоделированной среде.
Чтобы изучить, как может выглядеть среда моделирования для тестирования беспилотной системы GoA4, было организовано сотрудничество с компанией dSPACE. Первым шагом стало проведение пробного тестирования. Основное внимание уделялось испытанию подсистемы IPM, отвечающей за предотвращение инцидентов.
 Замкнутый контур взаимодействия подсистем поезда с окружающей средой в среде моделирования dSPACE (увеличить). Источник: dSPACE
Замкнутый контур взаимодействия подсистем поезда с окружающей средой в среде моделирования dSPACE (увеличить). Источник: dSPACE
Для проверки концепции Deutsche Bahn предоставила упрощенную модель IPM, которая была встроена в среду моделирования dSPACE. Таким образом был создан замкнутый контур управления и его можно было ввести в эксплуатацию с помощью цепочки инструментов dSPACE. Для этого было необходимо смоделировать все другие требуемые подсистемы (например, тормоза, привод, бортовую сигнализацию), а также динамику и физическую среду поезда (PTU).
Создание среды моделирования
Прежде всего требовалась имитационная модель, которая обеспечивала бы подходящее отражение динамики поезда с учетом структуры его различной составности. Задача состояла в том, чтобы реализовать общую модель динамики поезда. Для этого был использован продукт dSPACE «Automotive Simulation Models» (ASM).
Модель динамики транспортного средства была параметризована с помощью ModelDesk – еще одного продукта dSPACE. Для проверки концепции ее настроили таким образом, чтобы соответствовать четырехвагонному электропоезду класса 423 (выпускались в Германии в 1997-2008 годах для городских железнодорожных систем).
С помощью импорта специфических железнодорожных объектов, таких как рельсы, опоры контактной сети и световые сигналы, базовая визуализация дороги была заменена на среду, подобную железной дороге. Для демонстрации в ModelDesk также была импортирована железнодорожная сеть из OpenStreetMap.
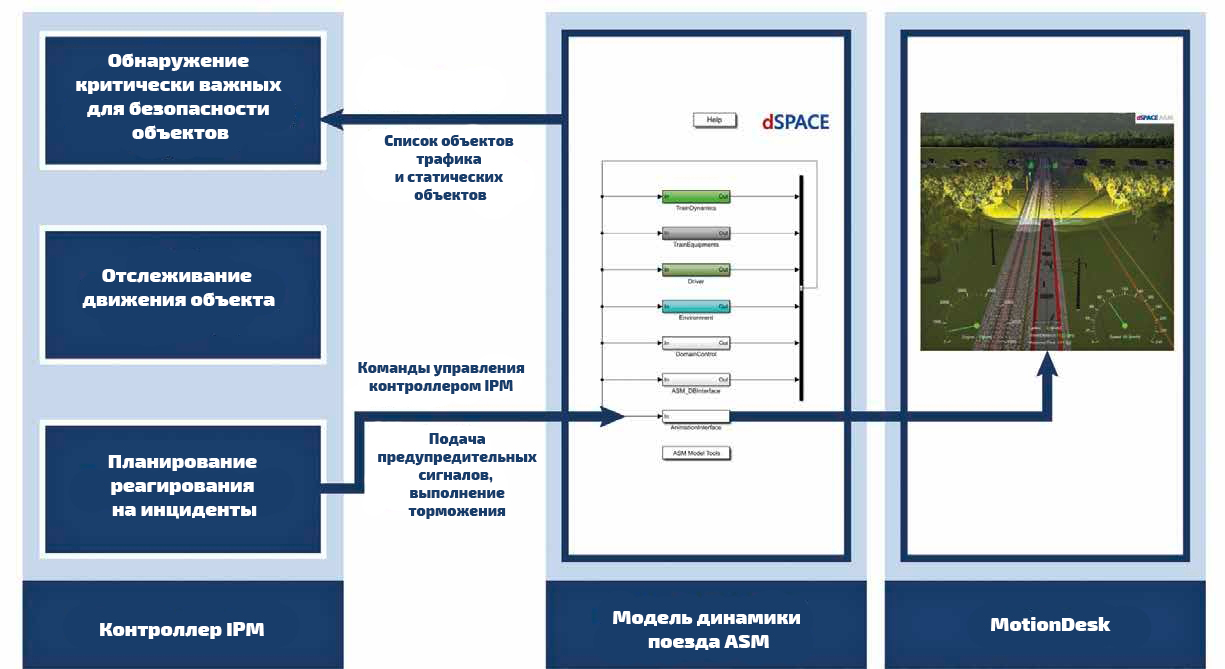 Замкнутый контур управления с моделью ASM в среде моделирования dSPACE (увеличить). Источник: dSPACE
Замкнутый контур управления с моделью ASM в среде моделирования dSPACE (увеличить). Источник: dSPACE
Следующим шагом стала интеграция упрощенного контроллера IPM от Deutsche Bahn для создания замкнутого контура управления с моделью ASM. К контроллеру IPM обращалась смоделированная система восприятия. Для упрощения были использованы списки объектов, предоставленные наземными моделями датчиков ASM. На основе распознанных объектов контроллер IPM определяет, должен ли поезд реагировать на эти объекты. Желаемая реакция, например включение предупреждающих сигналов, выполнение служебного или экстренного торможения, передавалась обратно в модель динамики поезда ASM, которая выполняла эту реакцию.
Оценка моделирования
Для проверки пригодности созданной среды моделирования и связанной с ней цепочки инструментов dSPACE для Digitale Schiene Deutschland были созданы два различных сценария использования.
Первый включает в себя ситуацию, в которой олень пересекает пути. Олень идентифицируется как движущийся животный объект с помощью 3D-датчиков и передается контроллеру IPM, который реагирует на появление объекта в зоне путевого полотна, активируя звуковой сигнал, визуальный сигнал предупреждения и экстренное торможение. Если олень покидает зону пути и больше не обнаруживается, поезд возобновляет нормальное движение.
Второй смоделированный сценарий включает в себя условия приближения поезда к переезду, на котором стоит автомобиль.
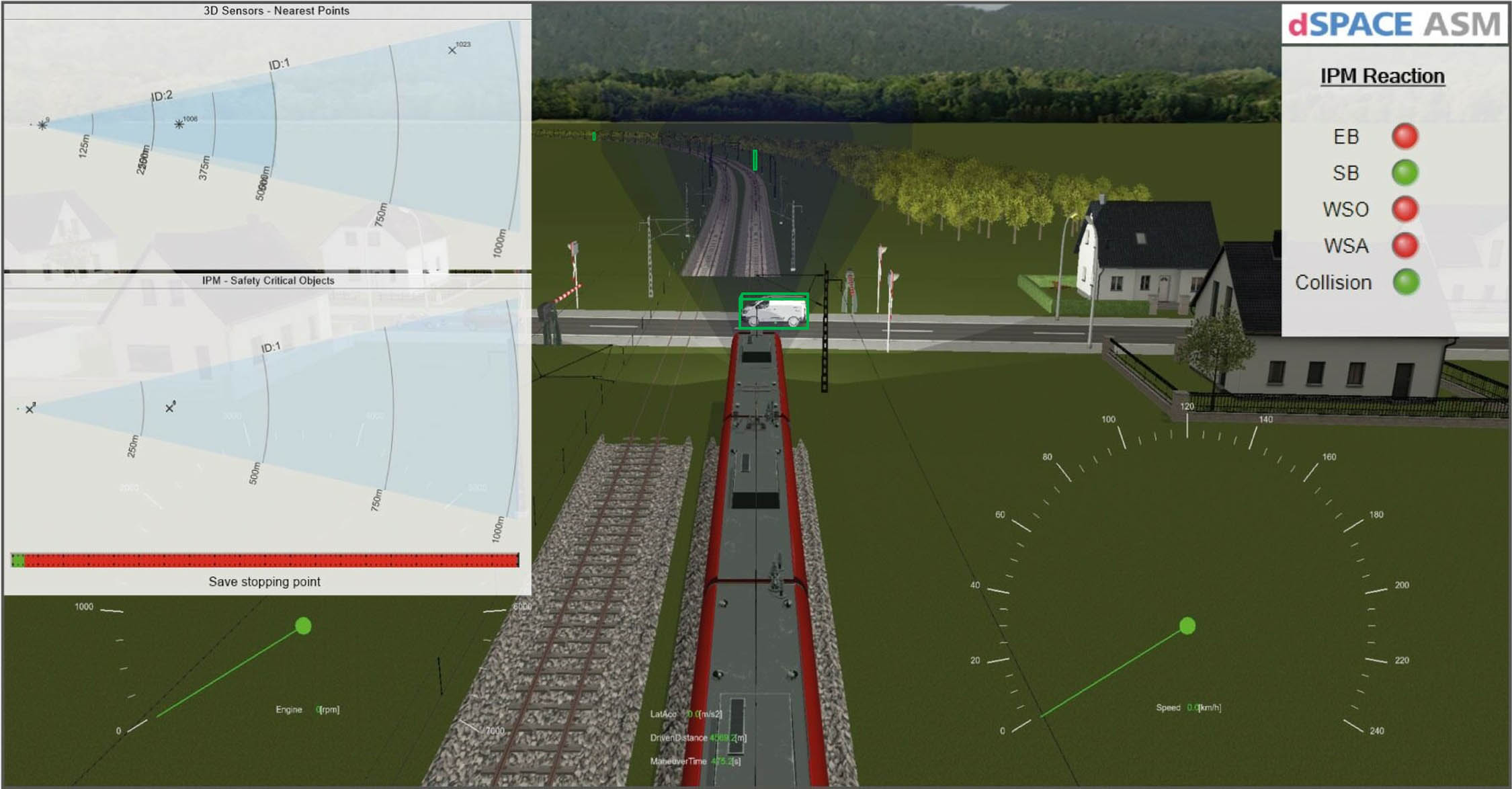 Визуализация в MotionDesk столкновения поезда с автомобилем на железнодорожном переезде. Источник: dSPACE
Визуализация в MotionDesk столкновения поезда с автомобилем на железнодорожном переезде. Источник: dSPACE
Только два объекта (отмеченные зелеными прямоугольниками на рисунке выше) оказываются на пути следования поезда и классифицируются контроллером IPM как критически важные для безопасности. Реакцией на это является визуальное предупреждение фарами и звуковой сигнал при включении рабочего тормоза. Если остановка с помощью рабочего тормоза невозможна из-за недостаточного расстояния до транспортного средства, то контроллер IPM активирует аварийный тормоз. Из-за сокращения оставшегося безопасного остановочного пути контроллер IPM в этом случае включает аварийный тормоз, визуальный предупреждающий сигнал и звуковой предупреждающий сигнал. В этом случае поезд может вовремя затормозить.
Эти два смоделированных сценария использования позволили усовершенствовать как расположение датчиков для лучшей обзорности, так и пересмотреть модель поезда, которая не учитывала историю наблюдений. Помимо прочего, программа MotionDesk уже заменена новым инструментом AURELION, который обеспечивает более реалистичную визуализацию окружающей среды и моделирование датчиков, камер, лидаров и радаров.
Следите оперативно за новостями рынков подвижного состава в Telegram-канале ROLLINGSTOCK